Home
Categories
Dictionary
Glossary
Download
Project Details
Changes Log
What Links Here
FAQ
License
ARINC661 Map projection
1 Overview
2 Algorithm
2.1 Reference of the Map
2.2 Computing the (East, North) coordinates from the (Latitude, Longitude) coordinates
2.3 Computing the (East, North) coordinates from the (Latitude, Longitude) coordinates
3 Computing the screen coordinates
4 Notes
5 See also
2 Algorithm
2.1 Reference of the Map
2.2 Computing the (East, North) coordinates from the (Latitude, Longitude) coordinates
2.3 Computing the (East, North) coordinates from the (Latitude, Longitude) coordinates
3 Computing the screen coordinates
4 Notes
5 See also
An ARINC 661 Server will use a Map projection to convert MapItems (Latitude, Longitude) coordinates to their associated positions in 100th of mm.
The projection algorithm use the following characteristics:
Overview
Main Article: ARINC 661 client API: Setting the Map reference
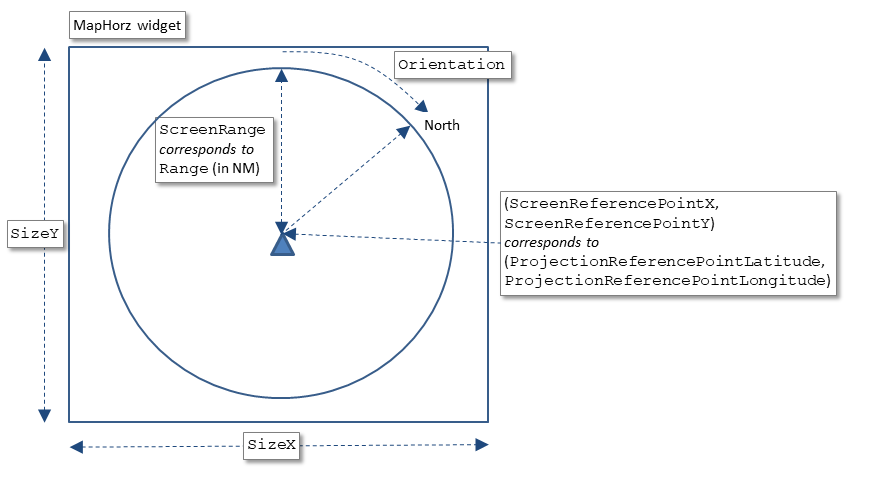
The projection algorithm use the following characteristics:
- The reference position of the Map (the PRP), both on the real world in (Latitude, Longitude)[1]
The (Latitude, Longitude) coordinates must be defined in degrees, but also in screen coordinates in the reference system of the MapHorz widget
- The range of the Map, both on the real world in nautical Miles, but also in screen coordinates
- The North orientation of the Map[2]
The orientation must be defined in degrees
Algorithm
The projection algorithm between (Latitude, Longitude) to (East, North) coordinates in nautical miles uses a simplified version of the Lambert conformal conic projection.Reference of the Map
These formulas allow to compute only once the overall values associated with the Map.



Computing the (East, North) coordinates from the (Latitude, Longitude) coordinates
The simplified formulas for computing the (East, North) coordinate of a mapItem are:



Computing the (East, North) coordinates from the (Latitude, Longitude) coordinates
The inverse of the previous formulas are:



Computing the screen coordinates
Computing the screen coordinates involves the orientation of the Map.Notes
See also
- ARINC661 map widgets: The concepts used by the ARINC 661 standard are close to those used in User interface markup languages
- UA ProjectionHelper: This article explains how the User Application ProjectionHelper works
- UA application: The built-in UA application allows to execute an ARINC 661 Client
×
![]()
Categories: builtin-applis | uaappli