Home
Categories
Dictionary
Glossary
Download
Project Details
Changes Log
What Links Here
FAQ
License
Publish Service
1 Overview
1.1 Data management
2 Declaring the Service
3 Interfacing with the Service
4 Use cases
5 Aircraft position example
6 Notes
7 See also
1.1 Data management
2 Declaring the Service
3 Interfacing with the Service
4 Use cases
5 Aircraft position example
6 Notes
7 See also
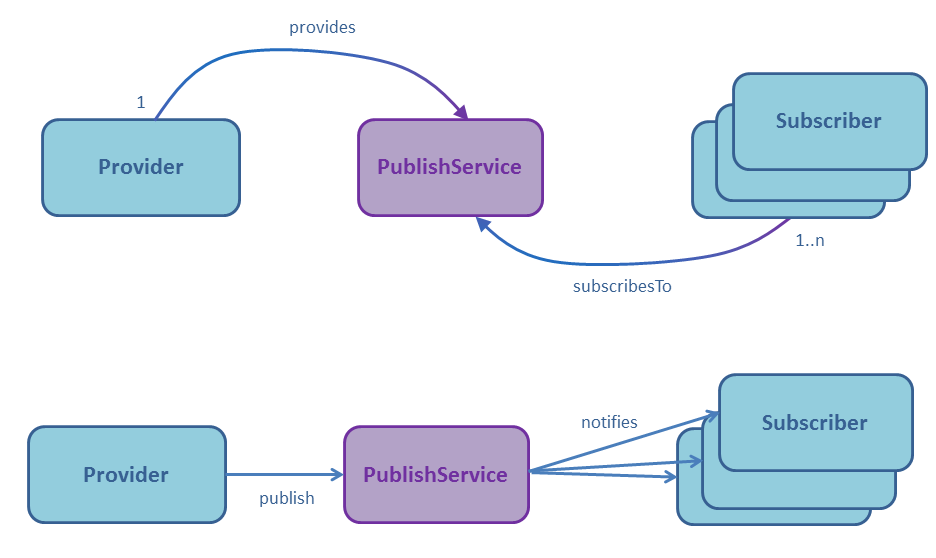
A publish Service is a service which handle the publication of datas from a provider to several subscribers. A publish Service:
Note that is is possible to configure the framework to allow each publish service and request-response service to allow more than one Service provider at the same time. See framework properties.
For example, you can define a
- Can only have one provider
- Can have one or several subscribers
Overview
The following diagram shows the architecture of a publish Service:- During configuration, only one provider can be active, but one or several subscribers can be associated with the Service
- During runtime, when the service is invoked by the provider, all the subscribers will be notified
Note that is is possible to configure the framework to allow each publish service and request-response service to allow more than one Service provider at the same time. See framework properties.
Data management
The datas sent alongside the Service will always always have their last modified value. It means that if you want to modify values for the datas associated with the Service, you can do so for only those modified compared to the last invocation of the Service.Declaring the Service
Declaring a publish Service is simple: you only have to define the Service name and ID (as for all Services), and the datas which are published by the Service. For example:<services> <publish name="position" id="1" > <data name="latitude" type="float" /> <data name="longitude" type="float" /> <data name="altitude" type="float" /> </publish> </services>See also services configuration.
Interfacing with the Service
Declaring how the Service is used for a module[1]
If the module is a provider or a subscriber of the Service
is specified in the module configuration for the Module. The declaration is to be performed under the interfaces element for the module configuration:- If the module is providing the service, declare a
pushelement - If you want the module to provide the service cyclically without taking care of the sending thread yourself, declare a
cyclicelement, and specify the frequency on which it should be sent - If the module is subscribing to the service, declare a
subscribeelement
<module name="theSender" > <interfaces> <push service="myPublish"/> <cyclic service="myCyclic" frequency="200ms"/> </interfaces> </module> <module name="theReceiver" > <interfaces> <subscribe service="myPublish"/> <subscribe service="myCyclic"/> </interfaces> </module>
Use cases
Thepublish Service use case is typically cases where you want to send datas to as many subscribers as necessary. A publish Service can be invoked as often as necessery (even cyclically).For example, you can define a
publish Service to publish an aircraft position (see the example below).
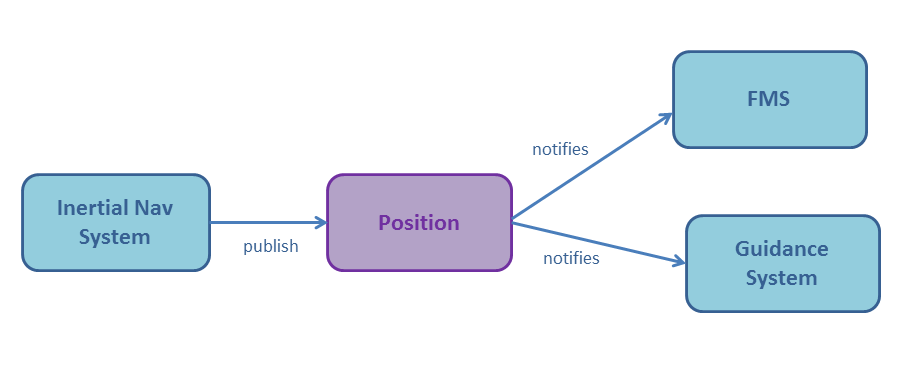
Aircraft position example
Consider the publication of an aircraft position. We would have theposition service definition: <services> <publish name="position" id="1" > <data name="latitude" type="float" /> <data name="longitude" type="float" /> <data name="altitude" type="float" /> </publish> </services>And the
InertialNavSystem, FlightManagementSystem, and GuidanceSystem modules definitions:<applications> <application name="aircraft" id="1"> <modules> <module name="InertialNavSystem" id="1" > <interfaces> <push service="position" attach="attach"/> </interfaces> </module> <module name="FlightManagementSystem" id="2" > <interfaces> <subscribe service="position"/> </interfaces> </module> <module name="GuidanceSystem" id="2" > <interfaces> <subscribe service="position"/> </interfaces> </module> </modules> </application> </applications>The
InertialNavSystem module provides the position Service. The FlightManagementSystem and GuidanceSystem modules are both notified of the published position.
Notes
- ^ If the module is a provider or a subscriber of the Service
See also
- Service: Services are processing units which are provided or required by modules
×
![]()
Categories: concepts