Home
Categories
Dictionary
Glossary
Download
Project Details
Changes Log
What Links Here
FAQ
License
Basic C tutorial
1 Overview
2 Architecture
3 XML configuration
3.1 Applications definition
4 Develop the PublishModule in C
4.1 Create the CodeBlocks project
4.2 Define the header
4.3 Define the source
5 See also
2 Architecture
3 XML configuration
3.1 Applications definition
4 Develop the PublishModule in C
4.1 Create the CodeBlocks project
4.2 Define the header
4.3 Define the source
5 See also
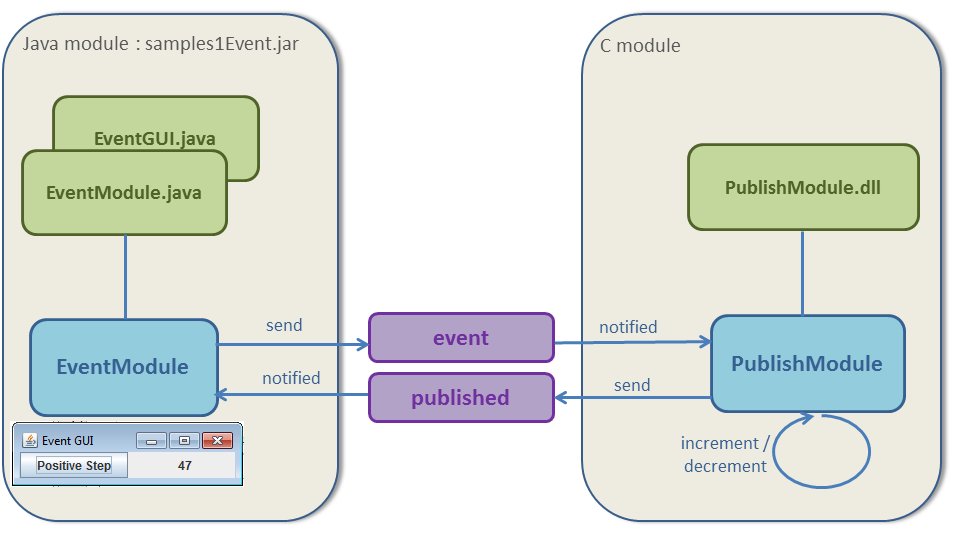
The first tutorial presented the coding and configuration of a very simple system with two modules. In this C tutorial, one of the modules will be reimplemented in C, using a basic C module.
We will reimplement the
We have therefore the following header:
Overview
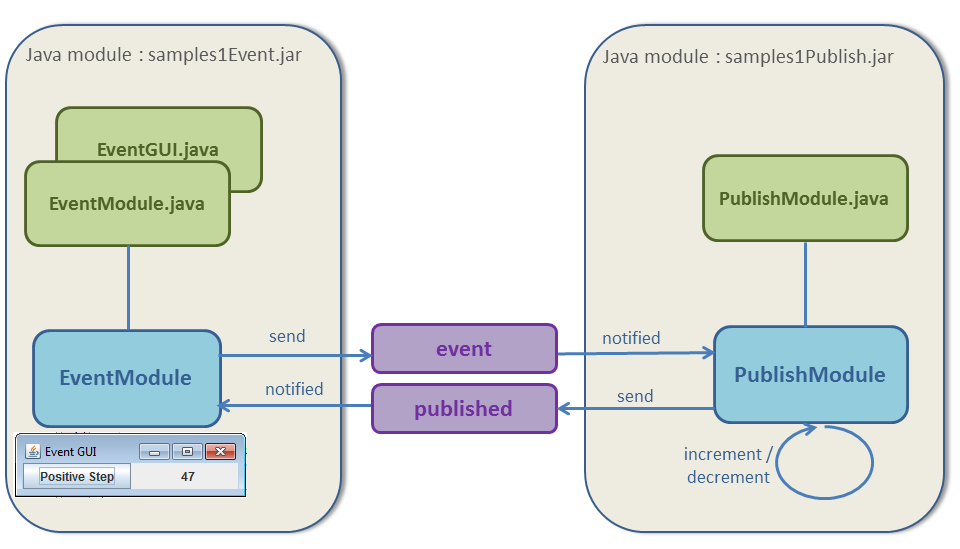
In the first tutorial, we had two modules, both of which implemented in Java:- The
PublishModulemodule increments or decrements a value cyclically - The
EventModulemodule allows to click on a toggle to set if the first module should increment or decrement the value, and shows the value
PublishModule in C.
Architecture
The first tutorial had two applications coded in Java:- The first
PublishModulewhich: - Increment or decrement the value
- Publish cyclically the value
- Listen to the toggle event to set if the value should increment or decrement
- The second
EventModulewhich: - Subscribe to the published value and show this value
- Show a toggle and sends an event when the user clicks on this toggle
We will reimplement the
PublishModule in C:
XML configuration
Only theapplications.xml XML file has to be modified to switch from a Java module implementation to a basic C module implementation.
Applications definition
We will change theapplications.xml XML file, by modifying the PublishModule configuration:<application name="publishAppli"> <modules> <cModule name="PublishModule"> <cImplementation path="PublishModule" /> <interfaces> <eventReceived service="event"/> <cyclic service="published" frequency="200ms" attach="attach"/> </interfaces> </cModule> </modules> </application>As you can see, we specified that the implementation of the
PublishModule is in the PublishModule.dll dll, in the same directory as the application.xml file.
Develop the PublishModule in C
Create the CodeBlocks project
We will first create a newPublishModule project in Visual Studio. See the Setting a CodeBlocks project for a C module for more information on how to do it.
Define the header
We can see that:- The module is notified from a boolean reception, hence the
startNotify(long service),endNotify(), andreceiveBoolean(char* dataName, int value)functions must be defined - An int value is modified and a service is invoked, hence the
setIntInvoker(void (*intInvokerInst)(char*, int))function callback must be defined - There is a cyclic service, hence a
publish(long service)function must be defined
We have therefore the following header:
__declspec(dllexport) void start(void (*startInvoke)(long), void (*endInvoke)); __declspec(dllexport) void setIntInvoker(void (*intInvokerInst)(char*, int)); __declspec(dllexport) void end(); __declspec(dllexport) void startNotify(long service); __declspec(dllexport) void receiveInt(char* data, int value); __declspec(dllexport) void receiveBoolean(char* data, int value); __declspec(dllexport) void endNotify(long service); __declspec(dllexport) void publish(long service); static int count = 0; static int step = 1; static void (*startInvokeInst)(long); static void (*endInvokeInst)(); static void (*intInvokerInst)(char*, int);
Define the source
#include <stdio.h> #include "module1.h" void start(void (*startInvoke)(long), void (*endInvoke)()) { startInvokeInst = startInvoke; endInvokeInst = endInvoke; } void end() { } void setIntInvoker(void (*intInvoker)(char*, int)) { intInvokerInst = intInvoker; } void startNotify(long service) { } void receiveBoolean(char* data, int value) { if (value) { step = -1; } else { step = 1; } } void endNotify(long service) { } void publish(long service) { count += step; startInvokeInst(2); intInvokerInst("value", count); endInvokeInst(); }
See also
- First tutorial: The first tutorial present the coding and configuration of a very simple system with two modules
- Advanced C tutorial: The advanced C tutorial is based on the first tutorial, but one of the modules is implemented in C with a native configuration
- Tutorials: This tutorial reuse the first tutorial, but the two modules are in two different framework instances
- Basic C module: This article explains how to specify basic C modules
×
![]()
Categories: tutorials