Home
Categories
Dictionary
Glossary
Download
Project Details
Changes Log
What Links Here
FAQ
License
Activating the tactical environment
1 Activating the tactical environment
2 Aircrafts behavior
3 Going to a waypoint
4 Creating a waypoint
5 Deleting a waypoint
6 Notes
7 See also
2 Aircrafts behavior
3 Going to a waypoint
4 Creating a waypoint
5 Deleting a waypoint
6 Notes
7 See also
By default, the aircrafts have fixed positions, but it is possible to have aircrafts moving alongside their respective flightplans, by setting the
The algorithm is the following:
Each
The
activate to true, or using the activate service during runtime. In that situation, it is possible to:- Change the destination waypoint for an aircraft
- Creating a waypoint or adding an existing waypoint to a flightplan
- Removing an existing waypoint from a flightplan
Activating the tactical environment
Theactivate boolean property allows to make the aircrafts moving alongside their respective flightplans. The period duration property specifies the period on which their position is updated[1]
It is set to 100 ms by default
. For example:<application name="tacticalenv"> <module name="tacticalenv"> <moduleProperty key="scenario" value="tacticalEnv2.xml" /> <moduleProperty key="activate" value="true" /> <moduleProperty key="period" value="500ms" /> </module> </application>It is also possible to activate / de-activate at any moment using the
activate service. For example:ServiceInstance activateService = module.getService("http://dassault-aviation.com/tacticalenv", "activate"); activateService.setDataBooleanValue("activate", true); activateService.invoke();
Aircrafts behavior
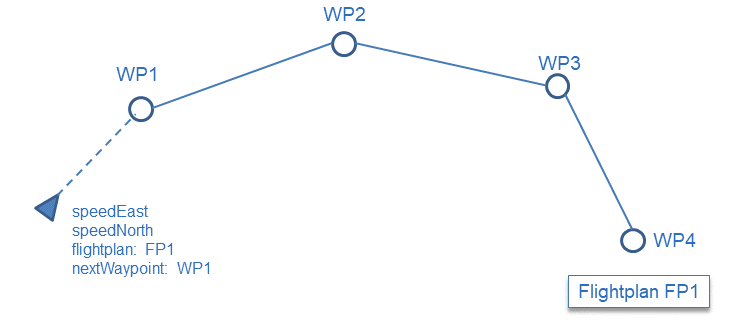
If the the tactical environment is activated, the aircrafts positions will be updated eachperiod. Ther move will be performed alongside the flightplan specified by the flightplan field of the aircraft, and to the waypoint specified by the nextWaypoint field.The algorithm is the following:
- Initially the aircraft will move from its current position to the
nextWaypoint - After the aircraft has reached this first waypoint, it will move from waypoint to waypoint in their order in the flightplan
- After the aircraft has reached the last waypoint, it will not move anymore
speedNorth and speedEast fields of the aircraft.
Each
period, the the aircrafts service will be invoked by the tacticalEnv Application, with an update to the following fields:-
latitudeandlongitudeaccording to the aircraft new position -
speedEastandspeedNorthbecause the aircraft follow the flightplan
aircrafts service will be invoked by the tacticalEnv Application, with an update to the following field:-
nextWaypointto specify the next waypoint to follow
nextWaypoint service will also be invoked by the tacticalEnv Application, with an update to the following field:-
aircraftto specify the aircraft name -
waypointto specify the waypoint that the aircraft will now follow[2]Its value is identical tonextWaypoint
aircraftsModel service will also be updated accordingly.The
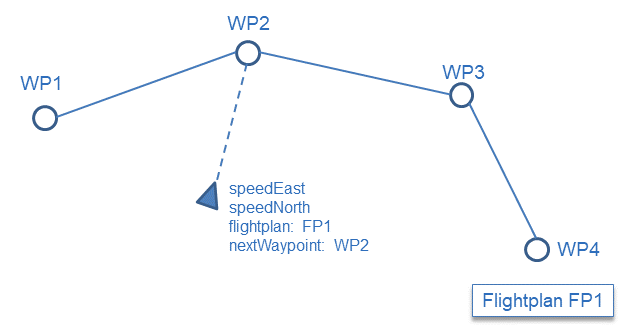
nextWaypoint is not necessarily the first waypoint in the flightplan. For example:
Going to a waypoint
Thegoto service allows to specify that a waypoint must go to a waypoint. It will change the flightplan and the nextWaypoint fields of an aircraft.<event name="goto"> <data name="mode" type="gotoMode" /> <data name="aircraft" type="string" /> <data name="flightplan" type="string" /> <data name="waypoint" type="string" /> </event>
Creating a waypoint
It is possible to create a waypoint by invoking thenewWaypoint service:<event name="newWaypoint"> <data name="flightplan" type="string" /> <data name="waypoint" type="string" /> <data name="type" type="string" /> <data name="positionType" type="waypointPosition" /> <data name="index" type="int" /> <data name="latitude" type="coordinate" /> <data name="longitude" type="coordinate" /> </event>If the
flightplan data is empty, then the waypoint will be created but not added in a flightplan, else it will be added in the specified flightplan. The positionType attribute allows to specify if the waypoint will just be added at the end of the flightplan (if its value is LAST), or at a specified index in the flightplan (if its value is INDEX). In this last case, the index data specifies the index of the waypoint in the flightplan.
Deleting a waypoint
It is possible to delete a waypoint by invoking thedeleteWaypoint service:<event name="deleteWaypoint"> <data name="flightplan" type="string" /> <data name="waypoint" type="string" /> </event>
Notes
See also
- tacticalEnv Application: The built-in tacticalEnv Application allows to manage a tactical environment
×
![]()
Categories: builtin-applis