Home
Categories
Dictionary
Glossary
Download
Project Details
Changes Log
What Links Here
FAQ
License
Map ontology tutorial
1 Use case
2 Architecture
2.1 Overview
2.2 Specify the modules interfaces
2.3 Tactical Environment
2.4 AlertEngine module
2.5 UA application
2.6 fillOntology module
3 Specifying the properties
4 Starting the framework
5 Asking requests
5.1 Waypoints requests
5.2 Alerts requests
6 Going further
7 Notes
8 See also
2 Architecture
2.1 Overview
2.2 Specify the modules interfaces
2.3 Tactical Environment
2.4 AlertEngine module
2.5 UA application
2.6 fillOntology module
3 Specifying the properties
4 Starting the framework
5 Asking requests
5.1 Waypoints requests
5.2 Alerts requests
6 Going further
7 Notes
8 See also
The map ontology tutorial present the usage of a tacticalEnv Application, a UA application, and a Jena module, to create a synthetic map for a business Jet aircraft, and allow to ask requests on an ontology associated with the aircraft and its environment.
The source code and configuration of this tutorial can be found here: sourceforge.net/projects/protoframeworksamples/
To create the objects in the Map, we will use a tacticalEnv Application. The synthetic map itself will be managed by a UA application.
The ontology should allow us to answer requests such as[2]
The module provides the following service:
The UA application is responsible to:
The UA Application has the following module configuration:
The fillOntology module is responsible to:
Several windows will appear:
You will have for example the following response in the
The source code and configuration of this tutorial can be found here: sourceforge.net/projects/protoframeworksamples/
Use case
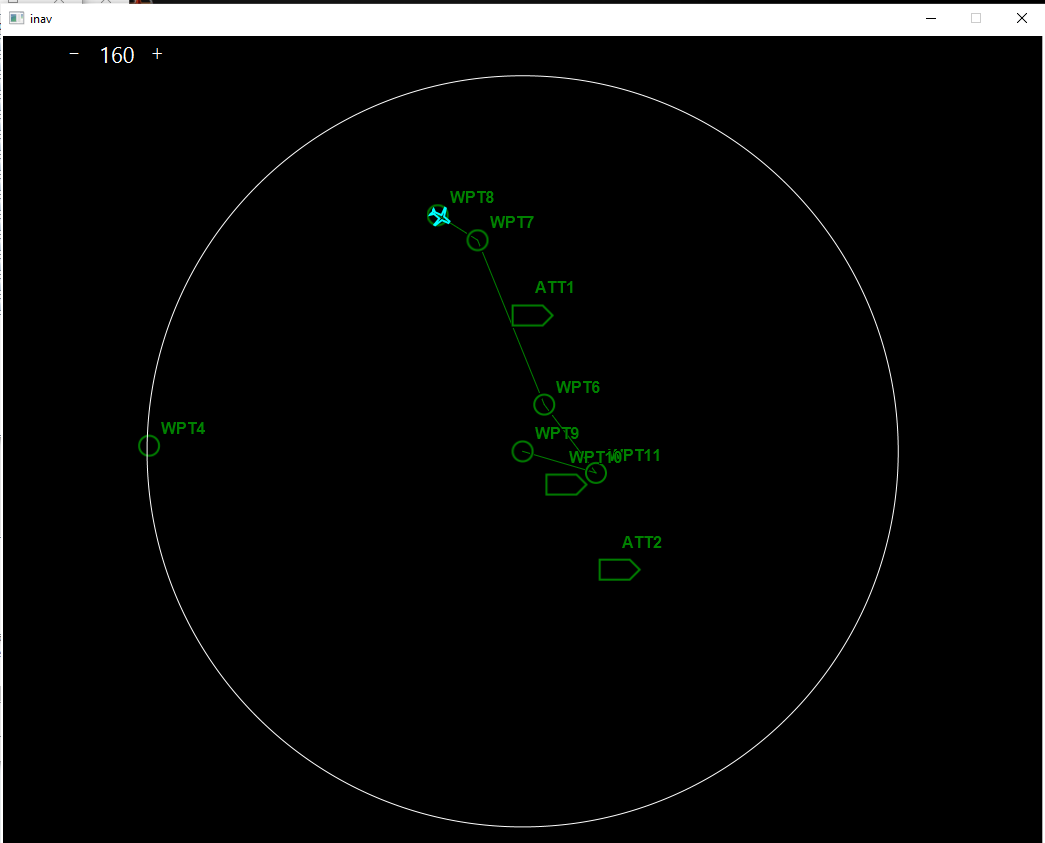
In this tutorial, we will create a synthetic map for a business Jet aircraft, and show in this Map:- A Flightplan and its Waypoints[1]
See Flight plan
- Landing Waypoints
To create the objects in the Map, we will use a tacticalEnv Application. The synthetic map itself will be managed by a UA application.
The ontology should allow us to answer requests such as[2]
Of course in this example we will ask the requests using the SPARQL request language, not in plain English
:- How many alerts are currently active?
- What is the list of alerts?
- What is the list of Waypoints?
- What is the distance of the closest landing Waypoint?
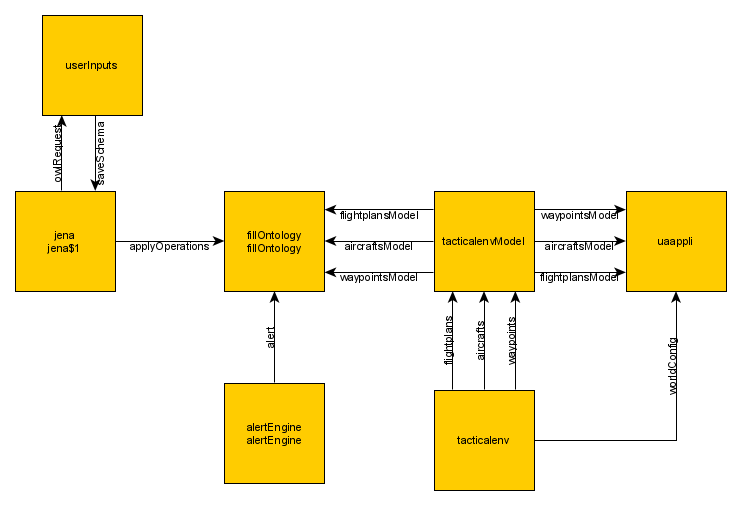
Architecture
Overview
We have the following modules:- A tacticalEnv Application and an associated tacticalenvModel Application to produce the environment (Aircraft, Flightplan and Waypoints)
- A Jena module to handle the ontology
- A FillOntology module to update the ontology during the Aircraft movement, and when alerts are created or removed
- A userInputs application module to send SPARQL requests
- A UA application module to show the synthetic Map
- An AlertEngine module to generate alerts
- A userInputs application module to send SPARQL requests
Specify the modules interfaces
First you must put thetacticalEnvCommon.jar and the JenaCommon.jar Jar files in the global deployment because this library must be shared between the tacticalEnv Application, the Jena module, and the UA application. If you don't do that, you would encounter a ClassCast exception[3]
: <applications> <deployment> <lib url="tacticalEnvCommon.jar" /> <lib url="JenaCommon.jar" /> </deployment> ... </applications>
Tactical Environment
The tactical environment scenario contains the following elements:- A World configuration to specify the center of the Map
- A FEBA
- A list of zones
- One Flightplan
- A list of Waypoints
- One Aircraft
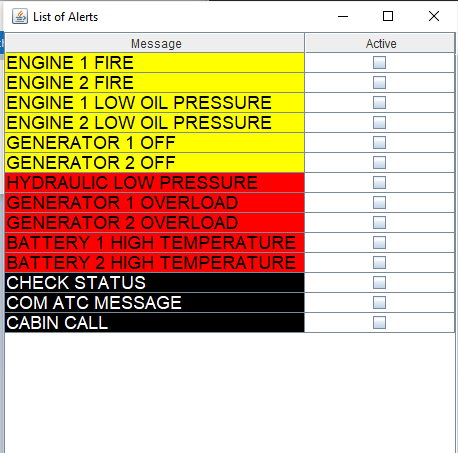
AlertEngine module
The AlertEngine module is responsible to:- Send creation or deletions of alerts depending on the user clicking on an alert list
The module provides the following service:
<event name="alert"> <data name="alert" type="alert" desc="the alert"/> <data name="status" type="alertStatus" desc="the alert status"/> </event>The
alertStatus types have the following definition:<enumType name="alertType" > <enumValue name="WARNING" /> <enumValue name="CAUTION" /> <enumValue name="ADVISORY" /> </enumType> <enumType name="alertStatus" > <enumValue name="NEW" /> <enumValue name="REMOVED" /> </enumType> <structType name="alert"> <field name="number" type="int" /> <field name="type" type="alertType" /> <field name="content" type="string" /> </structType>Each time the user clicks on a checkbox in front of an alert:
- If the checkbox is selected, the
alertservice is sent with thestatusset toNEW - If the checkbox is unselected, the
alertservice is sent with thestatusset toREMOVED
UA application
Main Article: Synthetic map UA application
The UA application is responsible to:
- Show the elements of the tactical environment (flightplans, waypoints, and aircraft
- Handle the Zoom In / Zoom Out on the Map, and the change of the map center
The UA Application has the following module configuration:
<application name="uaappli"> <deployment> <lib url="UAApplication.jar" /> <lib url="UAAppliHelper.jar" /> </deployment> <modules> <module name="uaappli"> <interfaces> <eventReceived service="worldConfig" uri="http://dassault-aviation.com/tacticalenv"/> <eventReceived service="flightplansModel" uri="http://dassault-aviation.com/tacticalenv"/> <eventReceived service="waypointsModel" uri="http://dassault-aviation.com/tacticalenv"/> <subscribe service="aircraftsModel" uri="http://dassault-aviation.com/tacticalenv"/> </interfaces> </module> </modules> </application>It will be notified from the following services:
- The
worldConfigservice to set the center of the map - The
flightplansModelandwaypointsModelservices to set the flightplan and the Waypoints - The
aircraftsModelservice to update the position of the Aircraft
fillOntology module
Main Article: fillOntology module
The fillOntology module is responsible to:
- Fill the Ontology with the flightplan, and the waypoints
- Fill and update the Ontology with the aircraft position
- Update the Ontology depending on the notification of the
alertservice
Specifying the properties
We have the following properties file:<properties> <application name="jena"> <module name="jena"> <moduleArrayGroupProperty key="schemas"> <moduleArrayValue> <moduleProperty key="name" value="inav" /> <moduleProperty key="owlData" value="MapGeoSparql.owl.rdf" /> <moduleProperty key="prefixNS" value="inav:" /> <moduleProperty key="owlNS" value="http://localhost/INAV#" /> <moduleProperty key="geosparql" value="true" /> </moduleArrayValue> </moduleArrayGroupProperty> <moduleProperty key="debug" value="false" /> <moduleProperty key="commit" value="true" /> </module> </application> <application name="uaappli" > <module name="uaappli" > <moduleProperty key="uaImpl" value="InavUI.jar" /> <moduleProperty key="uaPath" value="org.da.arinc.syntheticmap.InavUI" /> <moduleProperty key="a661Config" value="arinc/arincserver.properties" /> <moduleProperty key="includeServer" value="true" /> </module> </application> <application name="alertEngine" > <module name="alertEngine" > <moduleProperty key="alertList" value="alerts.xml" /> </module> </application> <application name="tacticalenv"> <module name="tacticalenv"> <moduleProperty key="scenario" value="tacticalEnv.xml" /> <moduleProperty key="activate" value="true" /> <moduleProperty key="updatePeriod" value="1s" /> </module> </application> </properties>
Starting the framework
We start the framework with thefilelist.xml file for our configuration, as for all our other tutorials:
java -jar protoframework.jar config=filelist.xml
As you see, in this configuration, the Aircraft does move. Now we can ask SPARQL requests about the environment using the userInputs application interface.Several windows will appear:
- The framework logger window
- The userInputs application window
- The UA application UI window
- The Alerts window
Asking requests
TheowlRequest service has the following datas:<requestResponse name="owlRequest"> <request> <data name="reqSchema" desc="Schema key" type="string" /> <data name="query" desc="JENA query" type="string" /> <data name="responseType" desc="Response Type" type="ontologyResponseType" /> </request> <response> <data name="respSchema" desc="Schema key" type="string" /> <data name="response" desc="JENA query response" type="string" /> <data name="xmlResponse" desc="JENA XML query response" type="xml" /> <data name="requestStatus" desc="Request status" type="requestStatus" /> </response> </requestResponse>You can send requests (ie queries) with the userInputs application. Try several queries which are defined in the
queries sub-directory. The reqSchema data must be set to inav because it is the key of our schema in the properties.
Waypoints requests
The following request returns the list of Waypoints:SELECT ?label WHERE { ?wpt rdf:type inav:Waypoint . ?wpt inav:Label ?label . }You will have the following response in the
response output data:----------- | label | =========== | "ATT1" | | "WPT7" | | "WPT10" | | "WPT9" | | "WPT4" | | "ATT2" | | "WPT11" | | "WPT8" | | "WPT6" | -----------The following request returns the list of Waypoints which are in the FlightPlan:
SELECT ?label WHERE { ?wpt rdf:type inav:Waypoint . ?fp rdf:type inav:FlightPlan . ?wpt inav:isWaypointFrom ?fp . ?wpt inav:Label ?label . }You will have the following response in the
response output data:----------- | label | =========== | "WPT7" | | "WPT9" | | "WPT11" | | "WPT8" | | "WPT6" | -----------The following request returns the nearest ATT Waypoint and its distance:
SELECT ?label ?distance WHERE { ?wpt rdf:type inav:Waypoint . ?wpt inav:Label ?label . ?wpt inav:hasWaypointType <http://localhost/INAV#ATT> . ?ac rdf:type inav:Aircraft . ?ac inav:Label "falcon" . ?wpt inav:hasExactGeometry ?auto_2 . ?auto_2 inav:asWKT ?auto_3 . ?ac inav:hasExactGeometry ?auto_4 . ?auto_4 inav:asWKT ?auto_5 . BIND (geof:distance(?auto_3, ?auto_5, <http://www.opengis.net/def/uom/OGC/1.0/nauticalMile>) as ?distance) } ORDER BY ASC( ?distance ) LIMIT 1? ac rdf:type inav:Aircraft . ?acYou will have the following response in the
response output data:-------------------------------- | label | distance | ================================ | "ATT1" | 42.03500329415974e0 | --------------------------------This last SPARQL query is a bit more complex than the others:
- We get the Waypoint individuals which are of the ATT type
- We get the Aircraft
- We get the geometries of both the Waypoint and the Aircraft
- We compute the distance between the Waypoint geometry and the Aircraft geometry
- We order the results by ascending distance and keep only the first one (which is the closest)
Alerts requests
The following request returns the list of Alerts:SELECT ?number ?type WHERE { ?alarm rdf:type inav:Alarm . ?alarm inav:AlarmNumber ?number . ?alarm inav:hasAlarmType ?type . }To have a non empty result you need to check some Alerts in the AlertEngine GUI.
You will have for example the following response in the
response output data:----------------------------------------------- | number | type | =============================================== | "5" | <http://localhost/INAV#AmberAlarm> | | "7" | <http://localhost/INAV#RedAlarm> | | "3" | <http://localhost/INAV#AmberAlarm> | -----------------------------------------------
Going further
The next tutorial uses the same Ontology as this one, but the requests are built using the SPARQL request creation utility, and the results are returned as objects rather than text.Notes
- ^ See Flight plan
- ^ Of course in this example we will ask the requests using the SPARQL request language, not in plain English
- ^ See sharing libraries between applications
See also
- Tutorials: This tutorial reuse the first tutorial, but the two modules are in two different framework instances
- tacticalEnv Application: The built-in tacticalEnv Application allows to manage a tactical environment
- tacticalenvModel Application: The built-in tacticalenvModel Application allows to maintain a data store from datas provided by a tacticalEnv module
- Jena module: The Jena application allows the user to invoke the Apache Jena ontology framework
- UA application: The built-in UA application allows to execute an ARINC 661 Client
×
![]()
Categories: tutorials